快速上手指引
Note
以下内容在用户拿到R300的时候已经完成配置和测试,保证功能正常。 如果非必要,请勿修改!
以下内容可以作为您二次开发的一个例子
板载计算机设置
设置固定IP
将无线/有线键鼠插入R300侧边的USB扩展口,然后打开R300电源
输入密码 amov 登录到系统
打开桌面右上角 WIFI图标,点击 Wired Connected,找到 Wired Settings,点击菜单栏上的 IPV4 ,选择 Manual ,输入IP 192.168.1.14 ,子网掩码 255.255.255.0 如下图所示:
设置相机序列号
在桌面打开终端
输入命令
rs-sensor-control,该命令将会返回 D435i 和 T265的序列号接着打开目录:
amovcar/src/common/sensor/amovcar_sensor/launch,将会看到以对应传感器命名的launch文件分别打开D435i / T265 的launch文件,把文件中的参数
defalut的值替换成第2步获取到的相机序列号即可。
Homer配置
将基站端Homer用3S电池供电,再将专有网口线的一端接入基站端Homer的LAN1或LAN2口,另一端接入到PC的网口。(如果您的PC没有网口,则需要一个USB转网口模块)
Warning
Homer需要用专门的电源线(电源线贴有 电源线 12V 字样的标签,如下图所示:
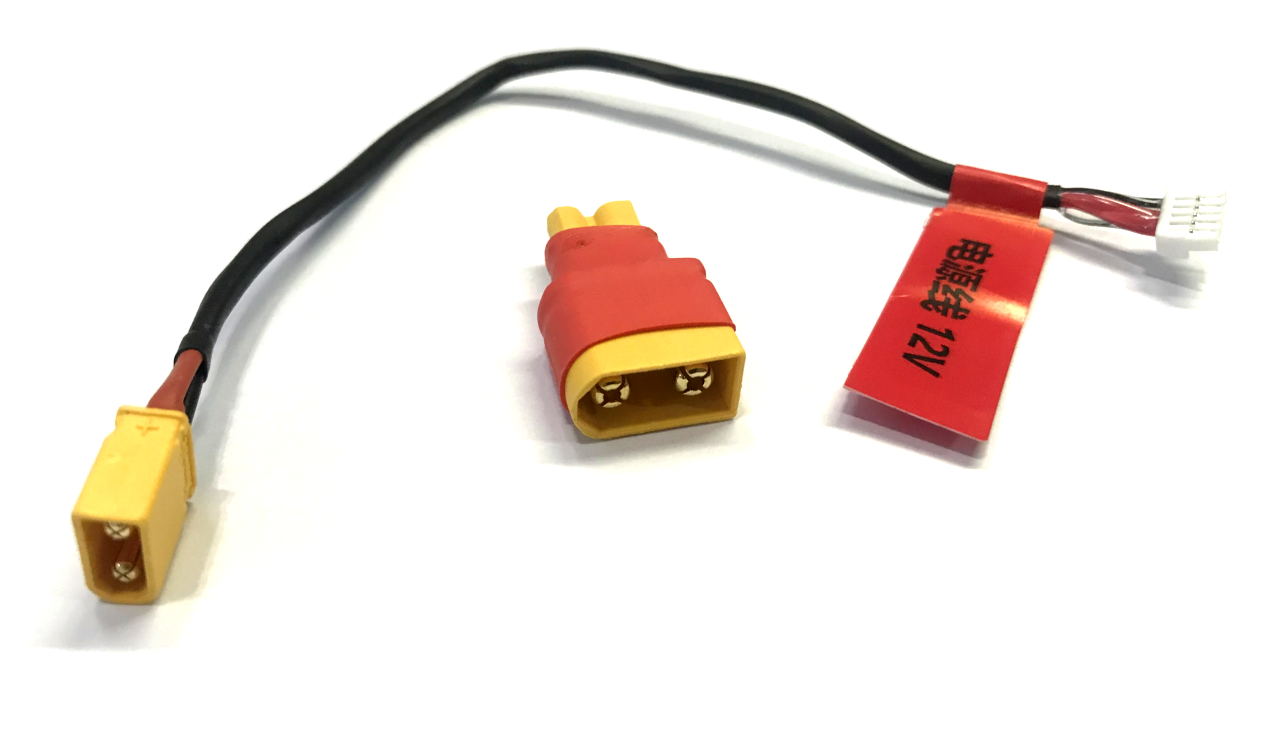
Homer的供电电压为12V
Note
LAN1或LAN2口为百兆网口。百兆网线如下:

在PC上(Windows系统)打开 控制面板—查看网络状态和任务—更改适配器设置—右键以太网—属性—Internet协议版本4—属性,设置为如下图所示:

将移动端Homer和基站端Homer同时通电。基站端Homer用3S电池供电,移动端Homer用小车电源供电。(或者也可以将移动端Homer拆下来,再单独用3S电池供电)
基站端Homer配置
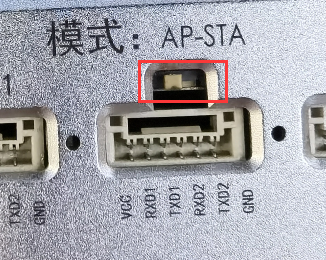
首先将基站端Homer的工作模式,拨到 AP端口,如下图所示:
打开浏览器,输入网址 192.168.1.100 进入配置界面
用户名和密码均为 admin
找到 config — Networking,选择界面中的 Static IP 修改为如下图所示:

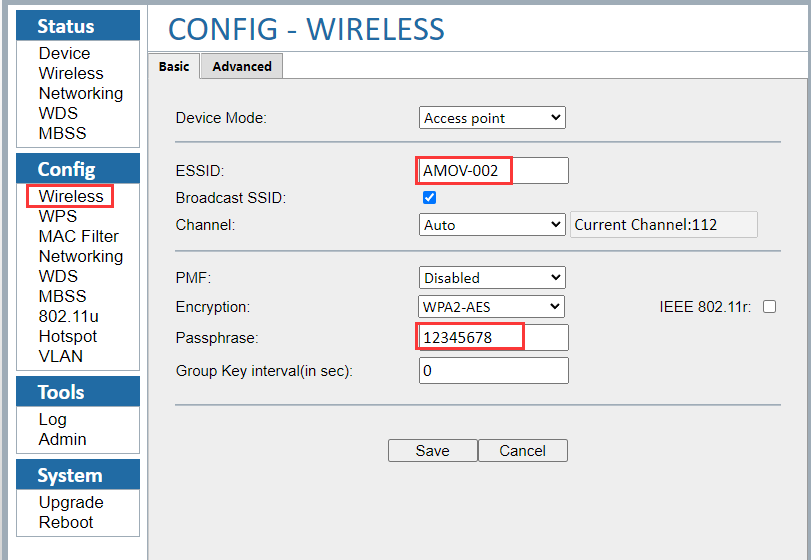
找到 config — Wireless,找到界面中的 ESSID,修改为 AMOV-002;找到界面中的 Passphrase,将密码修改为 12345678。图下图所示:
保存
移动端Homer配置
首先将移动端Homer的工作模式,拨到 STA端口,如下图所示:

打开浏览器,输入网址 192.168.1.10 进入配置界面
用户名和密码均为 admin
找到 config — Networking,选择界面中的 Static IP 修改为如下图所示:

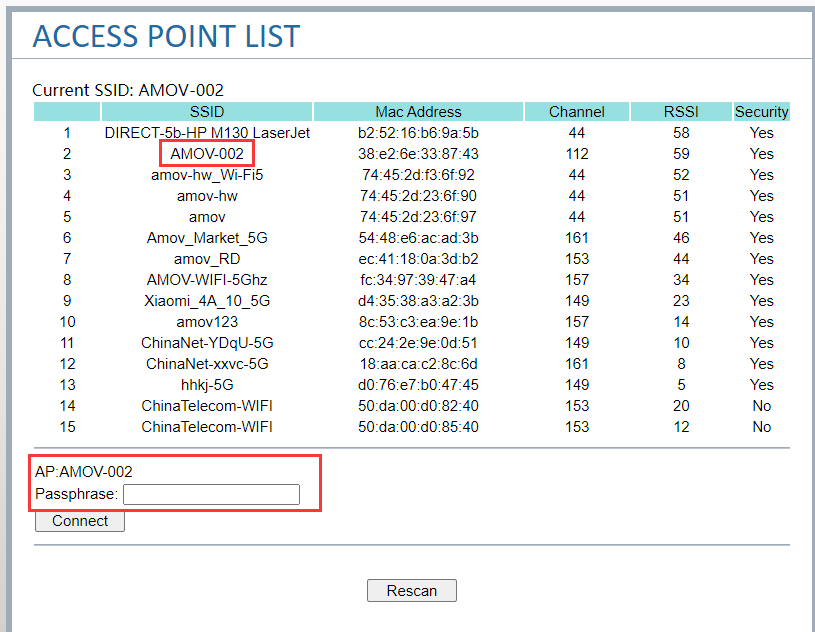
到 config — Wireless,找到界面中的 ESSID 旁边的 Scan AP,此时将会搜索到基站端Homer配置的WIFI名称 AMOV-002,然后输入密码 12345678 点击连接,如下图所示:
保存
Note
确保在配置过程中,两个Homer都通电。
当两个Homer正面的绿色指示灯常亮,表示二者正确配置并且互相连接成功。
基站端(AP模式下)的WIFI名称和密码可以根据实际情况自定义
移动端(STA模式下),在连接上基站端的WIFI以后,一定要 点击保存,否则下一次启动将不会自动连接
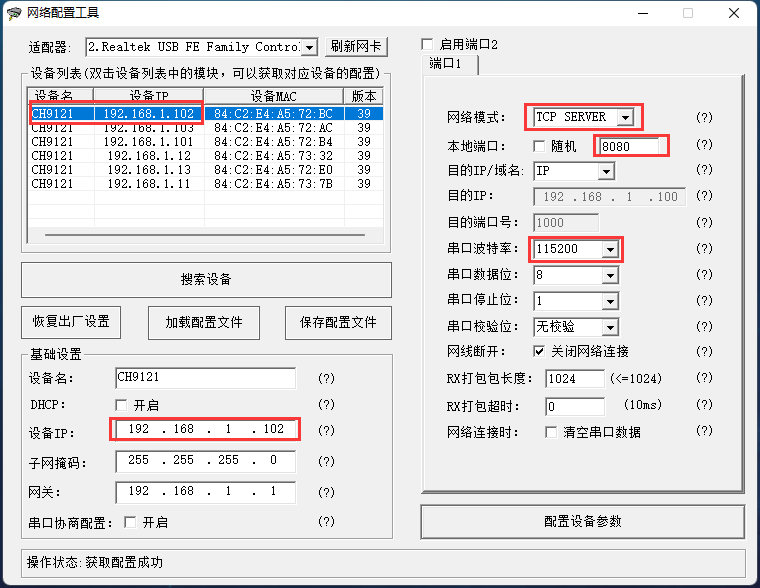
打开Homer配置软件( 点击下载 配置软件)
根据实际情况选择网卡设备。然后刷新设备,可以看到当前网络设备。
选择102,按照下图设置
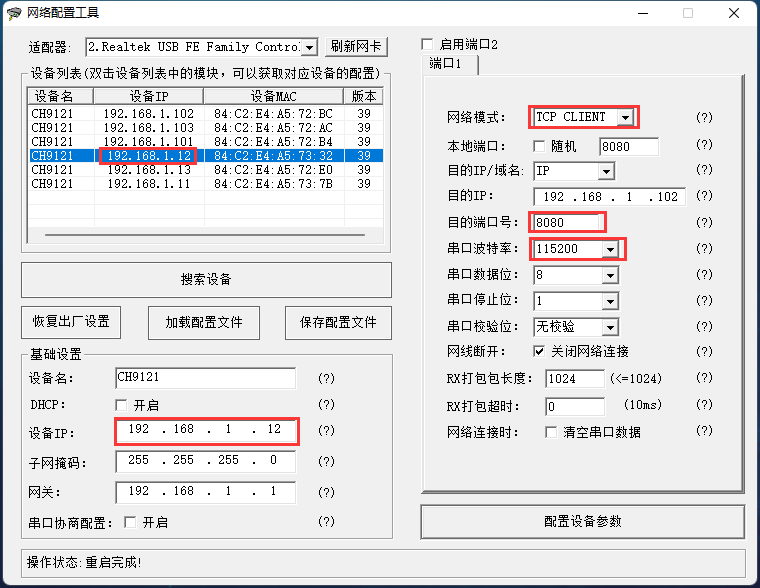
选择12,按照下图设置
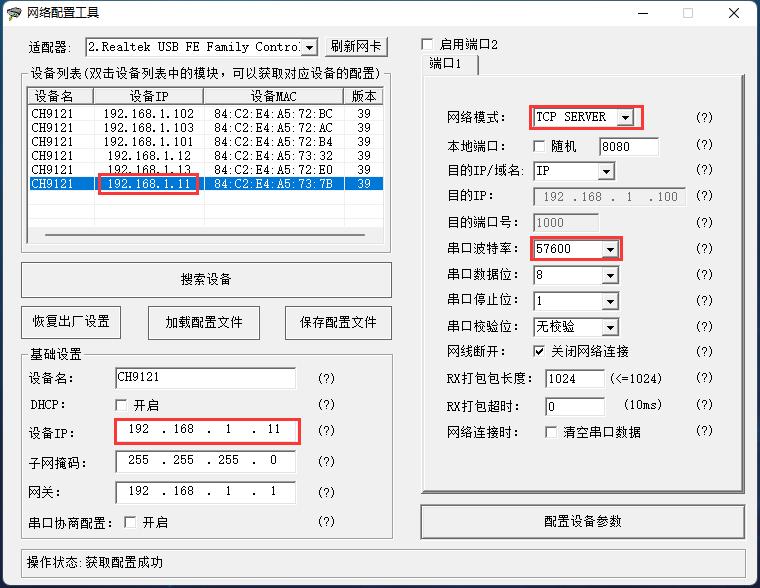
选择11,按照下图设置
Warning
在配置RTK时,所有的 RTK天线禁止热插拔,即 必须先断电,后插拔RTK天线。
移动端RTK配置
采用默认驱动,无需配置
基站端RTK配置
将基站端RTK用USB数据线连接至PC
通电(对于移动端RTK,可以使用R300电源供电,也可以拆下后单独用3S电源供电)
Warning
RTK供电线和Homer供电线不兼容,不能混用。必须使用专门的电源线。如下所示:

RTK的供电电压为12V
在PC上打开浏览器,输入 192.168.42.129 进入配置界面
输入用户名 admin, 密码 password 登录到配置界面
在页面左边找到 系统配置—网页命令 在对话框中输入命令
posave auto,点击提交然后输入
saveconfig,点击提交在页面左边找到 I / O配置—端口摘要 ,点击 COM2,即可进入COM2的配置界面
在 输出 栏下面找到 RTCM,将其改为 启用 ,点击确定即可
移动端RTK(4G)配置
将移动端RTK天线接入到移动端RTK的ANT1口,将小天线(又称小辣椒)接入到移动端RTK的4G接口,并插入4G卡。
通电(对于移动端RTK,可以使用R300电源供电,也可以拆下后单独用3S电源供电)
Warning
RTK供电线和Homer供电线不兼容,不能混用。必须使用专门的电源线。如下所示:
-
RTK的供电电压为12V
用USB数据线,一端接在移动端RTK的USB口,一端接在PC上
在PC上打开浏览器,输入 192.168.42.129 进入配置界面
输入用户名 admin, 密码 password 登录到配置界面
在该页面,您可以看到当前RTK的工作状态,包括卫星观测值质量、跟踪卫星数量、以及定位方式等
在页面左边的菜单栏找到 I/O配置,点击COM4口,进入如下图所示的配置

Note
R300产品不提供千寻、六分账号,如果您有这方面的需求,点击 阿木实验室淘宝店铺 ,获取更多信息
R300软件框架
amovcar文件结构图如下:

amovcar
amovcar文件夹为ROS下的工作空间文件夹,包含无人车几乎所有的源代码文件,无人车功能包均放置在src文件夹下。
common
common文件夹内含有R200以及R300两款无人车通用的一些功能包,包含一些功能模块以及二维激光雷达、三维激光雷达、相机等传感器驱动ROS功能包。
R200
R200文件夹内含有 r200_bringup、 r200_function、 r200_simulation 三个功能包。
r200_bringup为R200小车底盘的驱动功能包,R200下位机控制板为飞控,通过mavros连接飞控与板载计算机,r200_bringup在mavros上做了一层封装。
r200_function文件内含有R200无人车所有功能的源代码,包含自启动服务、配置文件、launch文件、sh脚本文件以及源代码等内容。
r200_simulation文件内含有R200无人车仿真的源代码,包含模型、gazebo环境、launch文件、配置文件等内容。
R300
R300文件夹内含有 r300_bringup、 r300_function、 r300_simulation 三个功能包。
r300_bringup为R300小车底盘的驱动功能包。
r300_function文件内含有R300无人车所有功能的源代码,包含自启动服务、配置文件、launch文件、sh脚本文件以及源代码等内容。
r300_simulation文件内含有R300无人车仿真的源代码,包含模型、gazebo环境、launch文件、配置文件等内容。