通信链路
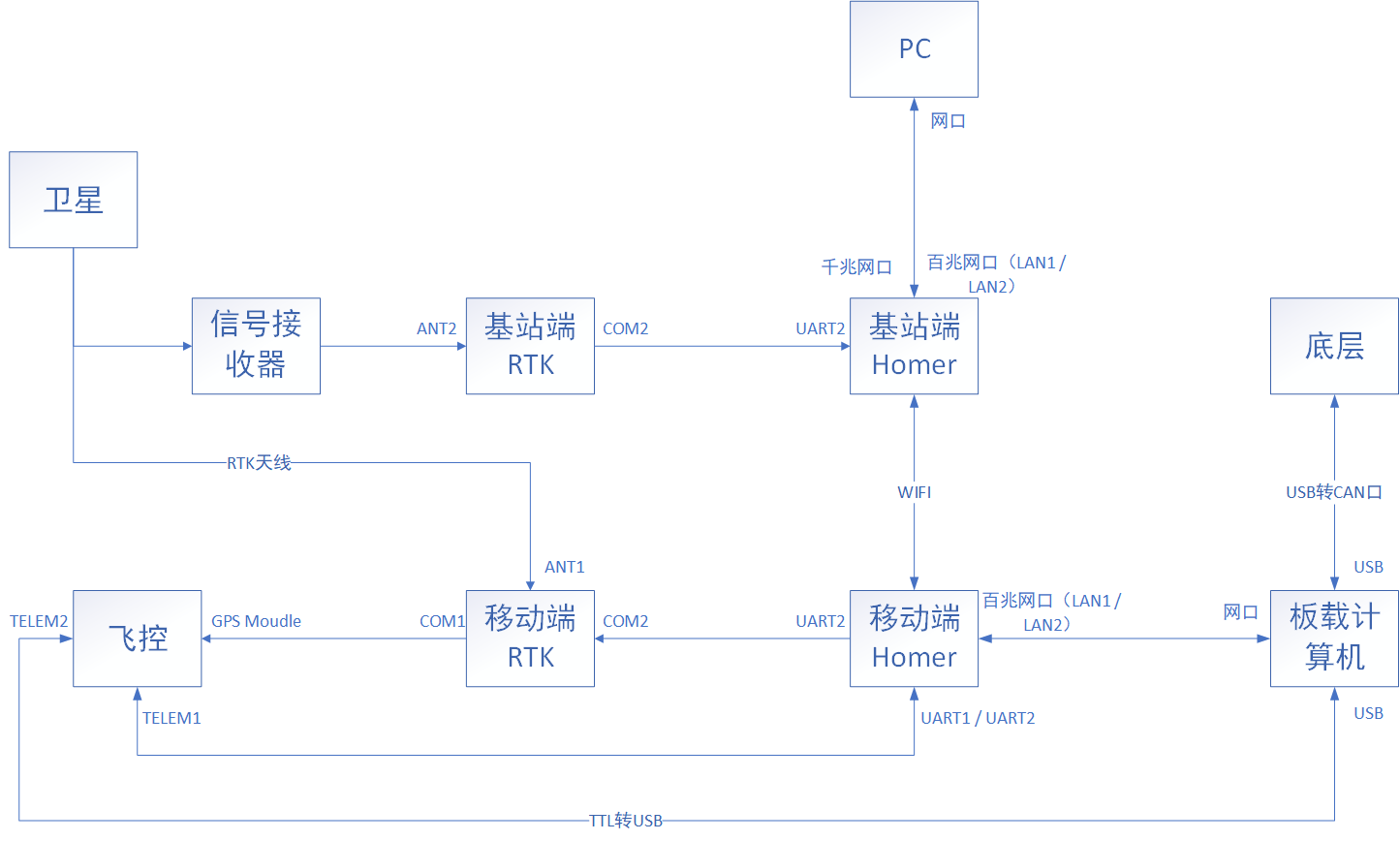
R300 基站版通信链路
Note
图数传Homer作为整个通信链路的核心,将各个模块通过 有线/无线 的方式连接起来。
PC和板载计算机通信主要通过以下链路: PC<===有线===>基站端Homer<===WIFI===>移动端Homer<===有线===>板载计算机 。其目的是通过远程软件登录到板载计算机,然后通过板载计算机启动相关程序,进而控制车辆。
PC和飞控通信主要通过以下链路: PC<==有线===>基站端Homer<===WIFI===>移动端Homer<===串口===>飞控 。其目的是通过PC端上的Mission Planner连接到飞控,从而获取飞控相关参数。
飞控如何获取卫星数据:首先,移动端RTK会通过ANT1口天线接收卫星信号;然后再接收来自基站端RTK的纠偏数据,其通信链路为 基站端RTK<===透传===>基站端Homer<===WIFI===>移动端Homer<===透传===>移动端RTK。接着,移动端RTK就会将这个两个来源的数据进行融合,最后将融合后的数据,通过串口的方式,传递到飞控的GPS Moudle口。从而实现了飞控的定位。
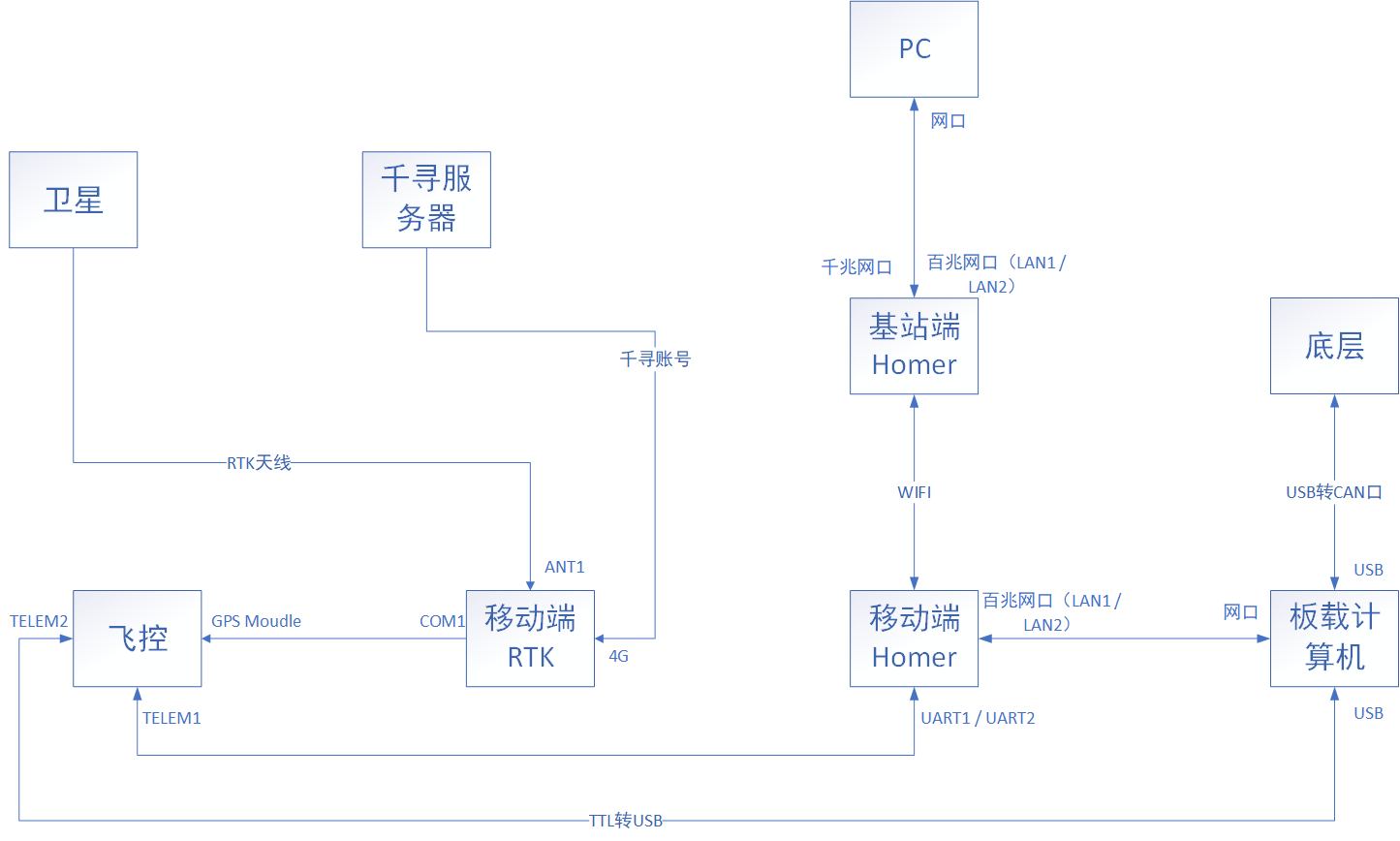
R300 移动版通信链路
Note
移动版通信和基站版通信不同之处在于, 不通过基站RTK 获取纠偏数据,而是通过千寻账号登录到其服务器,然后再由服务器进行位置解算,位置解算后,通过4G网络返回到移动版RTK。